| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ļSų°ūŃŪ“ÖCŲ„╚╦▒╚┘ÉĄ─═ŲÅV║═ūŃŪ“ÖCŲ„╚╦╝╝ągĄ─░lš╣Ż¼ūŃŪ“ÖCŲ„╚╦Ą─ąį─▄╚š ┌ģ═Ļ╔ŲĪŻį┌╚½ūįų„ūŃŪ“ÖCŲ„╚╦Ėé┘ÉųąŻ¼▒╚┘ÉęÄätī”ÖCŲ„╚╦Ą─┤¾ąĪėąć└Ė±Ą─ęÄČ©Ż¼▒╚ ┘Éųąį╩įSÖCŲ„╚╦ų«ķg║ŽĘ©ø_ū▓Ż¼ę¬Ū¾ÖCŲ„╚╦Š▀ėą║▄Ė▀Ą─ņ`╗Ņąį║═║▄ÅŖĄ─┐╣ø_ō¶ąįŻ¼ ę“┤╦į┌▒╚┘ÉųąŻ¼ūŃŪ“ÖCŲ„╚╦ęŲäė╩Ūʱ£╩┤_Īóī”┐╣Ģr─▄ʱ│ą╩▄Ė▀ÅŖČ╚ø_ō¶Ż¼▀@ą®å¢Ņ} ’@Ą├ĘŪ│Żųžę¬ĪŻßśī”ęį╔Žå¢Ņ}Ż¼╬ęéāįOėŗ┴╦ę╗ĘN“īäėčbų├Ż¼įōčbų├ĮYśŗŠo£ÉŻ¼š{╦┘ ņ`╗ŅŻ¼╩╣ÖCŲ„╚╦Š▀ėą┐ņ╦┘ęŲäėĪóČ©╬╗£╩┤_Īó┐╣ø_ō¶Īóī”┐╣ąįÅŖĄ─╣”─▄ĪŻįōčbų├ęčĮø╔Ļ šł┴╦ŽÓĻPīŻ└¹24ĪŻ
▒Š“īäėčbų├▓╔ė├─ŻēK╗»ļpųžŪČ╚ļ╩ĮĮYśŗŻ¼š¹╠ūčbų├ė╔ų▒┴„ļŖÖCĪóŽ─z▄ć▌åĪó ļŖÖC“īäėĘ©╠m▒PĪóę╗ī”Ę└ēm═Ų┴”Ū“▌S│ąĪóų╣═ŲŁhĪóō§╚”Īó▌S│ąų╣═ŲĘ©╠m▒PĪóļŖÖC░▓ čb╠ūśŗ│╔ĪŻŲõųąļŖÖCęį┬▌ßö▀BĮėŻ¼ŪČ╚ļ░▓čbĄĮļŖÖC░▓čb╠ūųąŻ¼śŗ│╔Dę╗ųžŪČ╚ļ╩Į ĮYśŗŻ╗ļŖÖC░▓čb╠ū═©▀^═Ų┴”Ū“▌S│ąĪóų╣═ŲŁh║═ō§╚”ŪČ╚ļ░▓čbĄĮŽ─z▄ć▌åųąŻ¼═¼Ģr ŲĄĮ▄ć▌å▌SĄ─ū„ė├Ż╗Ž─z▄ć▌åųąėą┼õ║Ž├µ░▓čbā╔ų╗▌S│ąŻ¼▌S│ą┼cų╣═ŲŁh║═ō§╚”Šo ┘NŻ¼ų╣═ŲŁh░▓čbĄĮ▄ć▌åĄ─░╝▓█ā╚Ż¼▌S│ąĘųäeė╔ų╣═ŲŁhĪóō§╚”ĪóŽ─z▄ć▌å╔ŽĄ─═╣┼_Īó ▌S│ąų╣═ŲĘ©╠m▒P║═ļŖÖC░▓čb╠ū╔ŽĄ─═╣┼_Ž▐Č©╬╗ų├Ż¼▌S│ąų╣═ŲĘ©╠m▒P═©▀^┬▌ßö┼c ļŖÖC░▓čb╠ū▀BĮėŻ¼ļŖÖC“īäėĘ©╠m▒Pė├┬▌ßö▀BĮėį┌Ž─z▄ć▌å╔ŽŻ¼Ųõųąą─ėąę╗µI▓█ ┐ūŻ¼ļŖÖC▌SÅ─ļŖÖC░▓čb╠ūD▓┐┐ūųą╔ņ│÷Ż¼┼cļŖÖC“īäėĘ©╠m▒PĄ─ųąą─µI▓█┐ū┼õ║Ž▀B ĮėŻ¼ęį╔ŽÖCśŗŽÓ╗ź▀BĮėŻ¼╣▓═¼ŪČ╚ļ░▓čbĄĮŽ─z▄ć▌åųąśŗ│╔Ą┌Č■ųžŪČ╚ļ╩ĮĮYśŗĪŻš¹ ╠ū“īäėčbų├│╔d┴ó─ŻēKŻ¼═©▀^ļŖÖC░▓čb╠ūĄū▓┐Ą─Ę©╠m▒PĮė┐┌┼cÖCŲ„╚╦▄ć¾wų▒Įė ▀BĮėĪŻ
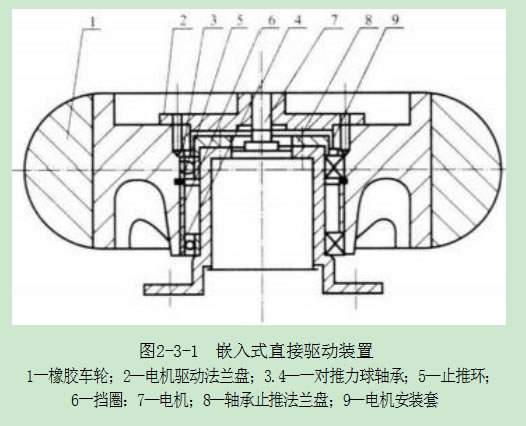
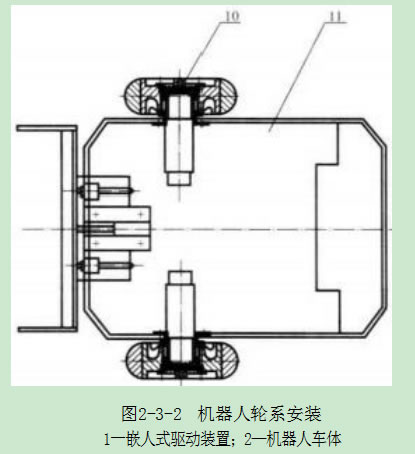
į┌įōčbų├ųą▀xė├Ħš{╦┘╣”─▄Ą─ų▒┴„ļŖÖCū„×ķäė┴”Ż¼ļŖÖC▐DäėĢrė╔ļŖÖC▌Sų▒Įė ĦäėŻ¼ļŖÖC“īäėĘ©╠m▒P┼c▄ć▌åŠo╣╠▀BĮėŻ¼└^Č°“īäė▄ć▌åŻ¼īŹ¼Fų▒Įė“īäėŻ¼▄ć▌å┼cļŖÖC ų«ķg═¼▓Įą²▐DŻ¼¤o╚╬║╬ūā╦┘Łh╣Ø║═ć¦║ŽŁh╣ØŻ¼▒▄├Ō┴╦└█ėŗ╗ž▐Dš`▓Ņ║═┐╔─▄Ą─┤“╗¼ĪŻ ÖCŲ„╚╦▄ć¾w╔Ž░▓čbū¾ėęā╔éĆ“īäėčbų├Ż¼═©▀^ī”ļŖÖC▐D╦┘Ą─š{╣ØüĒ┐žųŲ▄ć▌å▐D╦┘║═ ╗ž▐DĘĮŽ“Ą─ūā╗»Ż¼╩╣ÖCŲ„╚╦īŹ¼Fļp▌å▓Ņäė▀\äėŻ¼ū▀ų▒ŠĆĪółA╗Ī╔§ų┴Ė³Å═ļsĄ─▀\äėĪŻ Ž─z▄ć▌å┼cļŖÖC░▓čb╠ūķg▓╔ė├ę╗ī”═Ų┴”Ū“▌S│ąū„×ķ╗ž▐DĖ▒Ż¼▌S│ą┼cļŖÖC░▓čb╠ūĪŻ ═Ō╚”┼cŽ─z▄ć▌åŠ∙×ķŠo┼õ║ŽŻ¼ā╔▌S│ąķgęįų╣═ŲŁh║═ō§╚”▒Ż│ųķgŠÓŻ¼▌S│ą┼cļŖÖC░▓čb ╠ūķg═©▀^▌S│ąų╣═ŲĘ©╠m▒P║═ļŖÖC░▓čb╠ūĄ─═╣┼_Ž▐╬╗Ż¼▒ŻūCš¹¾wÖCśŗĄ─ĘĆČ©║═┼õ║ŽĄ─Šo├▄ĪŻš¹╠ūčbų├ųąŻ¼ļŖÖC░▓čb╠ūĪóļŖÖC“īäėĘ©╠m▒PĪó▌S│ąų╣═ŲĘ©╠m▒Pęį╝░ŽÓæ¬▀B Įė╝■═Ų┴”Ū“▌S│ąĪóų╣═ŲŁhĪóō§╚”╚½▓┐ŪČ╚ļŽ─z▄ć▌åųąŻ¼┼õ║ŽŠo├▄Ż¼═¼ĢrŲĄĮ▄ć▌å▌SĄ─ ū„ė├. ė╔ė┌įōĮYśŗČ╠Č°┤ųŻ¼╦∙ęįäéČ╚ÅŖČ╚ŽÓ«ö┤¾Ż¼─▄ē“│ą╩▄║▄ÅŖĄ─ø_ō¶ĪŻ▓óŪę▀xė├ Ą─“īäėļŖÖCŪČ╚ļļŖÖC░▓čb╠ūŻ¼ÖCŲ„╚╦ī”┐╣Ģr▄ć▌å│ą╩▄Ą─ø_ō¶ė╔┼c▄ć▌åŠo├▄┼õ║ŽĄ─ ļŖÖC░▓čb╠ūĄ╚▓┐╝■ų▒Įė│ą╩▄Ż¼▒▄├Ō┴╦ļŖÖCų▒Įė│ą╩▄ø_ō¶Ż¼ŲĄĮŠÅø_ū„ė├ĪŻęį╔Ž╣▓═¼ śŗ│╔ļpųžŪČ╚ļ╩ĮĮYśŗŻ¼ĮYśŗŠ½║åĪó¾wĘeąĪŻ¼ĘĆČ©ąįĖ▀║═Šo├▄Č╚Ė▀ĪŻŪČ╚ļ╩Įų▒Įė“īäė čbų├╚ńłD2-3-1╦∙╩ŠŻ¼ÖCŲ„╚╦▌åŽĄ░▓čb╚ńłD2-3-2╦∙╩ŠĪŻ
ŽÓī”é„Įy“īäėĘĮ░ĖČ°čįŻ¼įōčbų├Š▀ėą’@ų°ā׳cŻ¼░³└©Ż║
Īż ļŖÖCų▒Įė“īäėŻ¼═¼▓Į▌ö│÷Ż¼¤oųąķg£p╔┘é„äėŁh╣Ø╗“ć¦║ŽŁh╣ØŻ¼▒▄├Ō┴╦ŲżÄ¦é„ äėĄ─┤“╗¼š`▓Ņ╗“š▀é„Įy²X▌åé„äėųąĄ─└█ėŗ▐DĮŪš`▓ŅŻ¼Č©╬╗£╩┤_ĪŻ
Īż ¤oŽÓī”─”▓┴Ż¼£p╔┘▓╗▒žę¬Ą──źōp║═╣”┬╩ōp╩¦ĪŻ
Īż ŪČ╚ļ╩ĮĮYśŗ╩╣ļŖÖC║═▀BĮėĮYśŗŪČ╚ļ▄ć▌åŻ¼¾wĘe┐sąĪĪó═¼śėĄ─¾wĘe╔Ž┐╔ęį▀x ō±╣”┬╩Ė³┤¾Ą─ļŖÖCŻ¼╩╣ė├┤╦čbų├Ą─ÖCŲ„╚╦╦┘Č╚┐ņĪó┴”┴┐┤¾Īóī”┐╣ąįÅŖĪŻ
Īż ŪČ╚ļ▌åā╚Ą─Č╠ų∙ĀŅĮYśŗ┤·╠µé„ĮyĄ─╝ÜķL▌å▌SŻ¼¤oąĶ┬ō▌SŲ„Ż¼═¼Ģr▒Żūo┴╦ļŖÖCŻ¼┐╣ø_ō¶ąį║├ĪŻ
Īż ▌å▌S┐sČ╠Ż¼äéČ╚╠ßĖ▀Ż¼¤oŽÓī”─”▓┴Ż¼čėķL┴╦▌å▌Sē█├³ĪŻ
Īż įōčbų├▓╔╚Ī─ŻēK╗»įOėŗŻ¼Ė„į¬╝■▀BĮė║├║¾│╔d┴ó─ŻēKŻ¼Įė╔ŽÖCŲ„╚╦▄ć¾w╝┤ īŹ¼F“īäė╣”─▄Ż¼ęŲų▓ąį║▄ÅŖĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |