╦┘Č╚é„ĖąŲ„ė├üĒÖz£yÖCŲ„╚╦▀\äė╦┘Č╚Ż¼░³└©╔Ē¾węŲäė╦┘Č╚║═Ė„ĻP╣Ø▐Däė╦┘Č╚ Ą╚ĪŻį┌ė├Į╗ų▒┴„╦┼Ę■ļŖÖCū„×ķÖCŲ„╚╦“īäėį¬╝■ĢrŻ¼įńŲ┌ę╗░Ń▓╔ė├£y╦┘░lļŖÖCū„×ķ ╦┘Č╚Ą─Öz£yŲ„ĪŻ╦³┼cļŖäėÖC═¼▌SŻ¼ļŖäėÖC▐D╦┘▓╗═¼ĢrŻ¼▌ö│÷Ą─ļŖē║ųĄę▓▓╗═¼Ż¼ŲõļŖ ē║ųĄŠ═╩Ū▐Däė╦┘Č╚ĪŻ£y╦┘░lļŖÖCę¬Ū¾▌ö│÷ļŖē║┼c▐D╦┘ķg▒Ż│ųŠĆąįĻPŽĄŻ¼▓óę¬Ū¾▌ö │÷ļŖē║ČĖČ╚┤¾Ż¼Ģrķg╝░£žČ╚ĘĆČ©ąį║├ĪŻ£y╦┘░lļŖÖCę╗░Ń┐╔Ęų×ķų▒┴„╩Į║═Į╗┴„╩Įā╔ĘNĪŻų▒┴„╩Į£y╦┘ÖCĄ─äŅ┤┼ĘĮ╩Į┐╔Ęų×ķ╦¹äŅ╩Į║═ė└┤┼╩Įā╔ĘNŻ¼ļŖśąĮYśŗėąÄ¦▓█Ą─Īó┐šą─Ą─Īó▒P╩ĮėĪ╦óļŖ┬ĘĄ╚ą╬╩ĮŻ¼ŲõųąÄ¦▓█╩ĮZ×ķ│Żė├ĪŻ
╚ńłD4-1-5╦∙╩ŠŻ¼ų▒┴„£y╦┘░lļŖÖCĄ─Č©ūė╩Ūė└Š├┤┼ĶFŻ¼▐Dūė╩ŪŠĆ╚”└@ĮMĪŻ╦³Ą─ įŁ└Ē║═ė└Š├┤┼ĶFĄ─ų▒┴„░lļŖÖCŽÓ═¼Ż¼▐Dūė«a╔·Ą─ļŖē║═©▀^ōQŽ“Ų„║═ļŖ╦óęįų▒┴„ļŖ ē║Ą─ą╬╩Į▌ö│÷Ż¼┐╔ęį£y┴┐0Ī½10000r/min ┴┐JĄ─ą²▐D╦┘Č╚Ż¼ŠĆąįČ╚×ķ0 . 1 % ĪŻ ┤╦ ═ŌŻ¼═ŻÖCĢr▓╗ęū«a╔·Üł┴¶ļŖē║Ż¼ę“┤╦Ż¼╦³Z▀mę╦ū„╦┘Č╚é„ĖąŲ„ĪŻĄ½╩ŪļŖ╦ó▓┐Ęų╩ŪÖCąĄĮėė|Ż¼ąĶę¬ūóęŌŠSą▐Ż¼┴Ē═ŌŻ¼ōQŽ“Ų„į┌ŪąōQĢr«a╔·├}äėļŖē║Ż¼╩╣£y┴┐Š½Č╚ĮĄĄ═ĪŻę“ ┤╦Ż¼¼Fį┌ęÓėąė├¤o╦óų▒┴„£y╦┘░lļŖÖCĪŻ
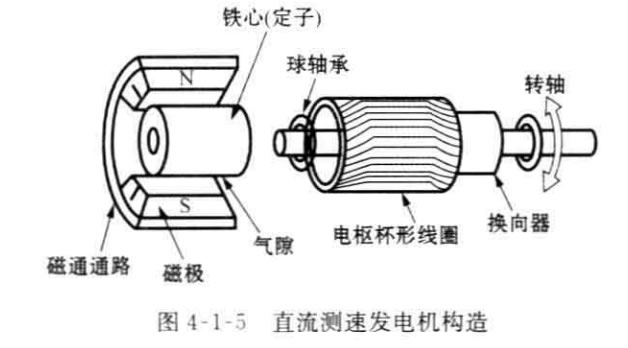
ė└Š├┤┼ĶF╩ĮĮ╗┴„£y╦┘░lļŖÖCĄ─śŗįņ║═ų▒┴„£y╦┘░lļŖÖCŪĪ║├ŽÓĘ┤Ż¼╦³į┌▐Dūė╔Ž ░▓čbČÓ┤┼śOė└Š├┤┼ĶFŻ¼Č©ūėŠĆ╚”▌ö│÷┼cą²▐D╦┘Č╚│╔š²▒╚Ą─Į╗┴„ļŖē║ĪŻļSų°ėŗ╦ŃÖC ╬óļŖūė╝╝ągĄ─▀M▓ĮŻ¼¼Fį┌ę╗░Ń▓╗į┘īŻķT╩╣ė├£y╦┘░lļŖÖCüĒ£y┴┐▐D╦┘Ż¼Č°╩Ū═©▀^ī”╬╗ ęŲ▀Mąą╬óĘųėŗ╦ŃüĒ½@Ą├╦┘Č╚ųĄĪŻ╚ń└¹ė├╣ŌļŖ┤a▒P£y┴┐ĮŪ╬╗ęŲĢrŻ¼į┌å╬╬╗Ģrķgā╚Ą─ ├}ø_öĄ╝┤×ķ╦┘Č╚ĪŻ
ė├ė┌ÖCŲ„╚╦▀\äėĻP╣ØĄ─┴Ń╬╗║═śOŽ▐╬╗ų├Ą─Öz£y,┴Ń╬╗╩ŪÖCŲ„╚╦ĻP╣Ø▀\äėķ_╩╝ĢrĄ─╬╗ų├,┴Ń╬╗Öz£yŠ½Č╚ų▒Įėė░ĒæÖCŲ„╚╦▀\äėĄ─Š½┤_Č╚;╬╗ęŲé„ĖąŲ„ę╗░ŃČ╝░▓čbį┌ÖCŲ„╚╦Ą─ĻP╣Ø╔ŽŻ¼ė├üĒÖz£yÖCŲ„╚╦Ė„ĻP╣ØĄ─╬╗ęŲ┴┐
┤¾▓┐Ęų▌åūė╩Ūė╔┐╔ūāą╬▓─┴Ž(╚ńŽ─z)ųŲ│╔Ż¼╦∙ęįŽÓ╗źū„ė├╩ŪĮėė|├µ;Ż¼╝┘įO╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦ųžą─▓╗Ė▀Ż¼ę“┤╦«öÖCŲ„╚╦╝ė╦┘▀\äėĢrė╔ųžą─Ų½Ė▀«a╔·Ą─Ė„▌åī”Ąžē║┴”Ą─ūā╗»║÷┬į▓╗ėŗ
ÖCŲ„╚╦ŽĄĮyĄ─ę¬Ū¾┤_Č©║¾Ż¼╩ūŽ╚ę¬┐╝æ]Ą─╩Ū▀xō±ČÓ┤¾Ą─ļŖÖC║Ž▀mŻ¼ų„ę¬┐╝ æ]žō▌dĄ─╬’└Ē╠žąįŻ¼░³└©žō▌d┼żŠžĪóæT┴┐Ą╚ĪŻį┌╦┼Ę■ļŖÖCųąŻ¼═©│Żęį┼żŠž╗“š▀┴”üĒ ║Ō┴┐ļŖÖC┤¾ąĪ
╚½ĘĮ╬╗ęŲäėÖCśŗÅ─«öŪ░╬╗ų├─▄ē“Ž“╚╬ęŌĘĮŽ“▀\äėŻ¼Č°▓╗ąĶę¬ÖCŲ„╚╦Ė─ūāū╦æB;į┌ąĶꬊ½┤_Č©╬╗║═Ė▀Š½Č╚▄ē█EĖ·█ÖĄ─Ģr║“ę▓ę¬Ū¾▀\äėÖCśŗŠ▀éõ╚½ĘĮ╬╗ęŲäėĄ──▄┴”
╠ž³c╩ŪÖCśŗĮM│╔║åå╬ĪóWMR ą²▐D░ļÅĮ┐╔Å─┴ŃĄĮ¤oŽ▐┤¾╚╬ęŌįOČ©;éĆ├„’@Ą─ā׳c╩Ū▓╗ąĶę¬īŻķTĄ─æęÆņŽĄĮy╚ź▒Ż│ųĖ„▌å┼cĄž├µĄ─┐╔┐┐Įėė|;═©▀^¬Ü┴ó“īäėĖ„▌å┐╔īŹ¼FÖCŲ„╚╦╚½ĘĮ╬╗ęŲäė
Ė∙ō■▌å╩ĮęŲäėÖCŲ„╚╦Ą─▄ć▌åéĆöĄüĒĘųŅÉėąā╔éĆĪó╚²éĆĪó╦─éĆ╗“┴∙éĆØL▌å;░┤ššWMR ▀\äėĄ─╝s╩°ĘĮ│╠┐╔ęįīóŲõĘų│╔ā╔ŅÉ;Ė∙ō■▌å╩ĮęŲäėÖCŲ„╚╦ŲĮ║Ōąį─▄ĘųŅÉŻ¼ėąäėæBŲĮ║Ō╩Į║═ņoæBŲĮ║Ō╩Įā╔ĘN
ėŅśõ┐Ų╝╝ęč└█ėŗ═Ļ│╔10▌å╚┌┘YŻ¼└█ėŗ╚┌┘Y│¼20ā|į¬Ż¼C ▌å═Č║¾╣└ųĄ▀_120ā|į¬Ż¼═Č┘YĘĮ║Ł╔w▒ŖČÓų¬├¹ÖCśŗ║═«aśI╗∙Į,ÖCąĄ╣Ę│÷žø┴┐Ą┌ę╗Ż¼╚╦ą╬ÖCŲ„╚╦│÷žø┴┐═╗ŲŲŪ¦┼_
Jetson Nano╩ŪūŅąĪĄ─įOéõŻ¼┼õéõ┴╦128║╦ą─GPU║═╦─║╦ARM Cortex-A57 CPUĪŻJetson XavierŽĄ┴ą─ŻĮMŠ▀ėąĖ▀▀_32 TOPSĄ─AIąį─▄Ż¼▀mė├ė┌ūįų„ÖCŲ„Ą─ęĢėX£yŠÓĪóé„ĖąŲ„╚┌║ŽĪó Č©╬╗║═ĄžłDśŗĮ©Ą╚æ¬ė├
ÖCŲ„╚╦ųąčļ┐žųŲŲ„,╝┤¼FėąĄ─ÖCŲ„╚╦┤¾─X,▒ŻūCÖCŲ„╚╦▓┐╝■Ą─╗∙▒Š▀\ū„─▄┴”;Ė„é„ĖąŲ„Ż¼ł╠ąąŲ„Ż¼ŠĆ╩°Ż¼ŠWĻPŽÓ«öė┌─XĖ╔é„▀fą┼ŽóĄ─ŠĆ╩°╝░ŠWĻPŻ¼ŲĄĮĖ„éĆ┐žųŲŲ„Ż¼é„ĖąŲ„ą┼ŽóĮ╗╗ź═©┬ōĄ─ū„ė├
ÖCŲ„╚╦ąĶĄų┐╣üĒūį═Ō▓┐Ą─ļŖ┤┼Ė╔ö_,ūį╔Ē«a╔·Ą─ļŖ┤┼įļ┬ĢąĶĄ═ė┌Ž▐ųĄ,▒▄├Ōė░Ēæų▄▀ģįOéõ;ģfūh╝µ╚▌ąį╩Ū┤_▒Ż╚╦ą╬ÖCŲ„╚╦Īó▓╗═¼įOéõĪóŽĄĮy╗“ŲĮ┼_─▄ē“į┌«ÉśŗŠWĮjŁhŠ│ųąĘĆČ©═©ą┼║═ģf═¼╣żū„Ą─ĻPµI─▄┴”
ÖCŲ„╚╦öĄō■┐╔ą┼Ą─║╦ą─į┌ė┌Į©┴óŪÕ╬·┐╔ł╠ąąĄ─┼ąČ©ś╦£╩;ÖCŲ„╚╦╦ŃĘ©┐╔ą┼Öz£y,æ¬Å─ĘĆČ©ąįĪó═Ė├„ąį║═┐╔“×ūCąį╚²┤¾ĘĮŽ“;Å─ąą×ķęŌłDūRäe,ł╠ąą┬ĘÅĮ║Ž└Ēąį,ė├æ¶Ėąų¬ę╗ų┬ąįĄ╚ĮŪČ╚įu╣└ÖCŲ„╚╦ąą×ķĄ─╔ńĢ■┐╔Įė╩▄ąį
ÖCŲ„╚╦ŁhŠ│▀mæ¬ąį╩ŪųĖ╚╦ą╬ÖCŲ„╚╦į┌▓╗═¼ŁhŠ│Śl╝■Ž┬▒Ż│ųš²│Ż▀\ū„,═Ļ│╔ųĖČ©╚╬䚥──▄┴”;ÖCŲ„╚╦ŲĮŠ∙¤o╣╩šŽķgĖ¶ĢrķgĘ┤ė│┴╦«aŲĘĄ─▀\ąąĘĆČ©ąį;“×ūC╚╦ą╬ÖCŲ„╚╦į┌ęÄČ©Śl╝■Ž┬Ą─╩╣ė├ē█├³